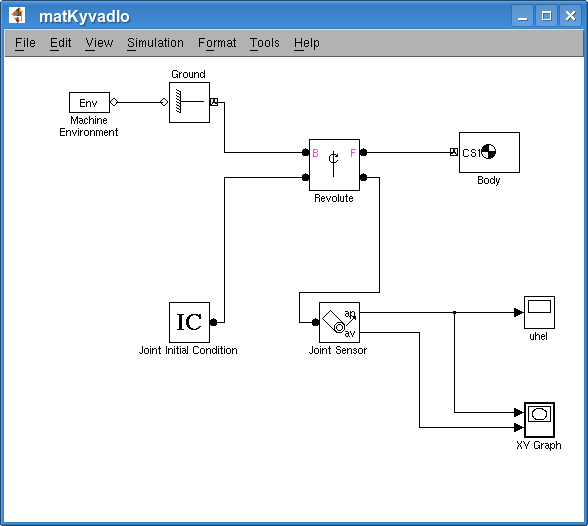
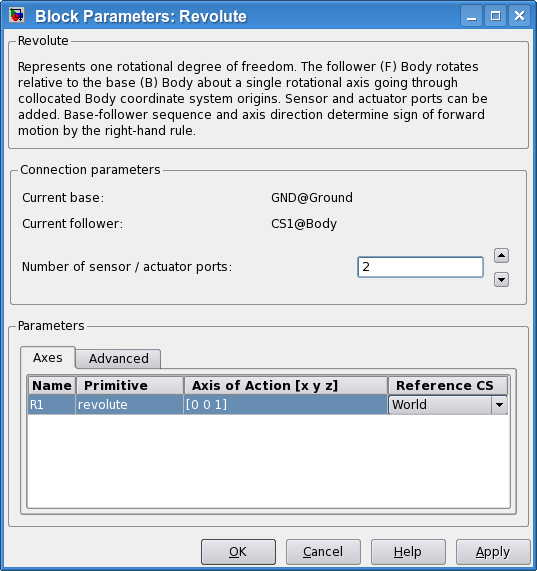
Pohyb kyvadla zajistíme pomocí bloku Revolute. Zde nastavíve počet portů na dva.
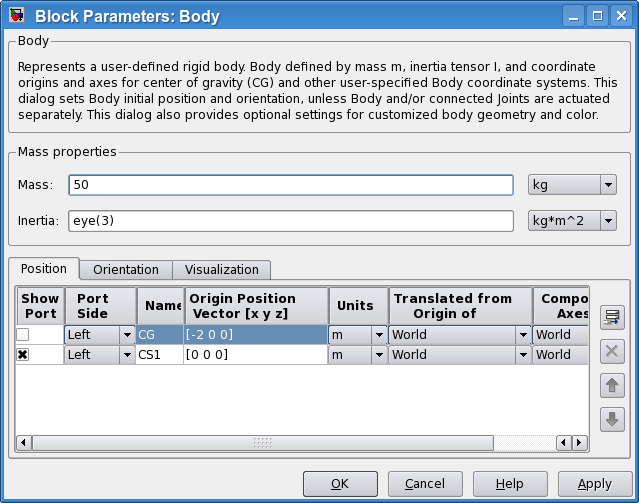
Vlastnosti kyvadla nastavíme v bloku Body
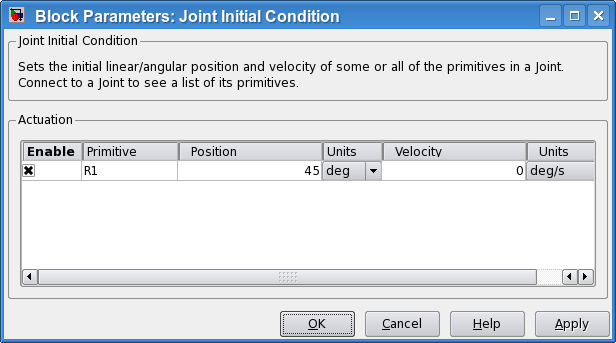
Počáteční podmínky nastavíme v bloku Joint Initial Condition
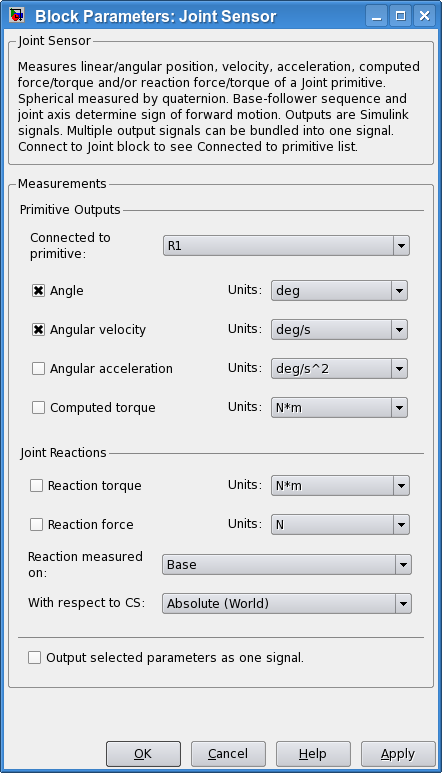
Budeme měřit úhel a úhlové zrychlení. Nastavíme tyto dvě veličiny v bloku Joint Sensor